稚晖君一口气发布5款人形机器人!开发者还能“0元购”
刚刚,“鸽”了一年的稚晖君,终于带着具身智能新品来填坑了!
没有什么比抽奖抽一台,更能体现对产品的自信了。
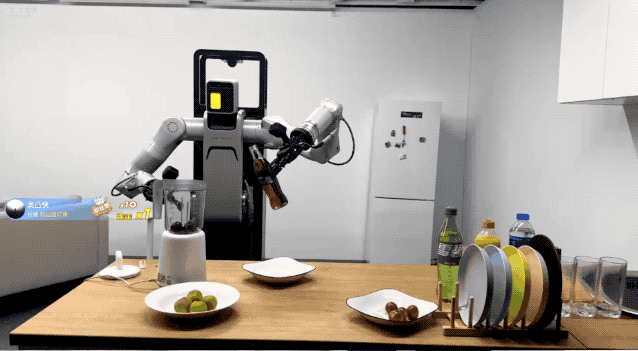
一上来,稚晖君也没藏着掖着,就在直播现场搭建的“摄影棚”里,机器人当场秀了一波在语音指令下动手调饮料的操作:
现场主持人,也由此番发布的远征A2机器人亲自担当。
一套小连招下来,网友们be like:

B站科技区流量担当,诚不我欺(手动狗头)。

尽管发布会只有短短1小时不到,但稚晖君和他背后公司智元机器人憋了一年,此番属实带来不少干货,先给大家伙做个小总结:
发布远征A2系列人形机器人
全栈开源灵犀X1系列机器人,主打一个“人形机器人人人造”
自研关节模组实现量产化迭代升级,灵巧手自由度升级至19个
定义具身智能G1至G5演进路线
……
总之,可以说是秀产品力的同时,也把硬核DIY的科技情怀给拉满了。
具体详情,咱们一项一项展开来唠~
面向量产的人形机器人
就像稚晖君自己所说,自去年8月中旬发布远征A1以来,他及他身后的智元机器人颇有些低调,在公众视野里可以说是“鸽”了一年。

但其实这一年中,智元机器人一直在“闷声干大事”。
智元机器人销售服务总经理姜青松对此补充说:
我们每个月都在迭代,但因为不具备商用条件,所以没有宣传。
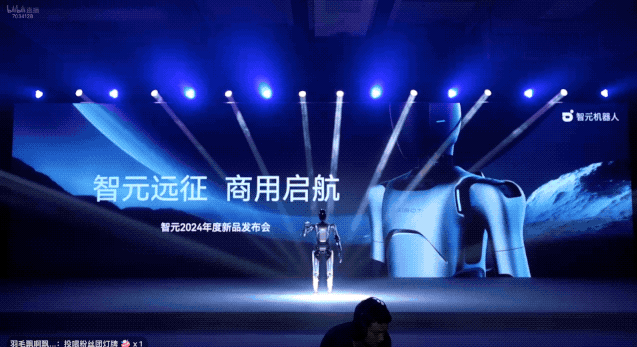
而现在,面向商用,智元确实在这场发布会上,给出了阶段性的思考和答案。
首先,在产品方面,远征A2系列机器人相较于前代,主打的就是一个“面向量产改进”。

为此,智元此番发布了3款适用于不同场景的机器人:
远征A2,身高一米七,体重140斤,是能双足行走的交互服务机器人。大模型加持下,具备流畅的讲解能力和稳定的运动功能。

远征A2-W,轮式柔性智造机器人。一开场给稚晖君做饮料的就是它,具备动态任务编排、复杂作业执行,以及双臂协同作业等能力。
远征A2-Max,重载特种机器人,能够搬动40kg以上的重物。该款机器人目前处于产品研发阶段。
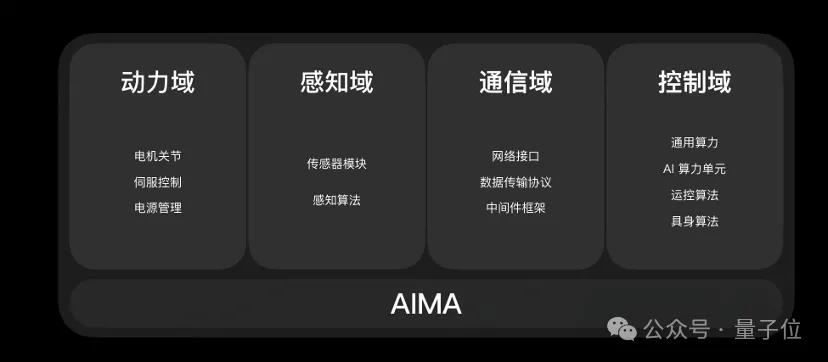
具体到技术细节上,智源机器人将机器人系统划分为动力域、感知域、通信域和控制域。
动力域方面,智元自研的PowerFlow关节模组实现量产化迭代升级。其中最强型号额定扭矩达到270Nm,峰值扭矩达到512Nm。
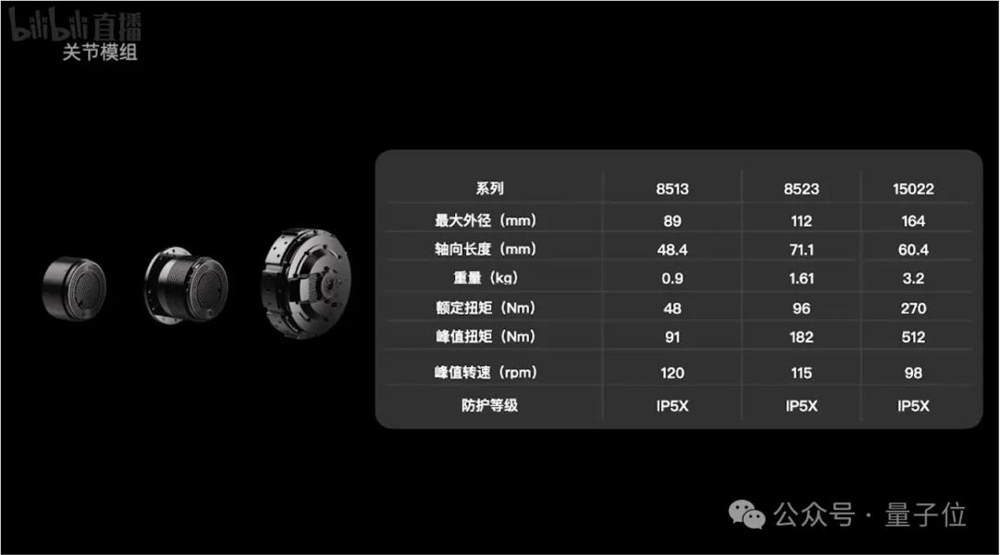
稚晖君表示,PowerFlow此番提升,主要是可靠性和稳定性达到量产级别。在现场,他也透露这款关节模组将开启对外售卖。
此外,机器人灵巧手的自由度也升级至19个,其中主动自由度达到12个,并引入了基于MEMS原理的触觉感知和视触觉感知技术。
使用工具拧螺丝:

拆快递:
干点穿针引线的精细活,都不在话下:

感知域方面,远征A2系列集成了RGBD相机、激光雷达、全景相机等传感器,引入自动驾驶Occupancy感知方案,通过SLAM算法进一步提升环境理解能力。
通信域方面,智元自研了专为具身智能打造的轻量化、高性能通信框架AimRT。
相比ROS等第三方中间件,在性能、稳定性、系统部署效率和灵活性均有提升的同时,兼容了ROS/ROS2已有生态。
AimRT还将于9月底开源。

控制域方面,结合Model-based和Learning-based两种算法,智元进一步提升了机器人的运动控制和适应能力。并预研了基于自然语言指令集驱动的、可以适配不同机器人本体的AgentOS,基于强化学习,实现机器人技能的精准编排和高效执行。
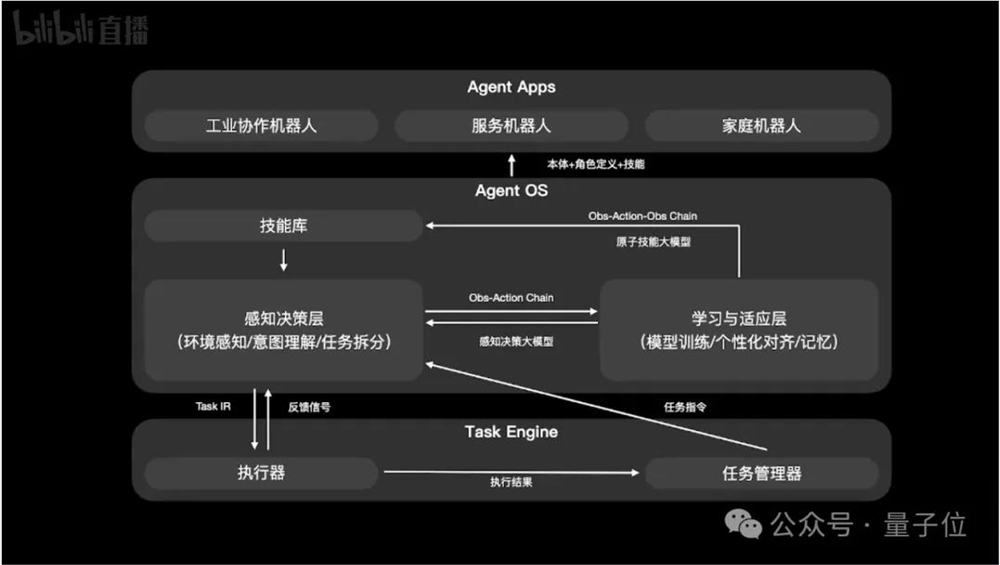
另外,智元还构建了面向开放生态的软件平台AIMA(AI Machine Architecture),覆盖机上、云端和客户端。该平台集成了机器人软件的核心技术,同时提供丰富的二次开发接口。
具身智能技术演进路线
值得关注的是,配合自家商用化进程,智元此番还提出了类似自动驾驶L1-L5的具身智能技术演进路线:
G1至G5(其中“G”指通用人工智能)。
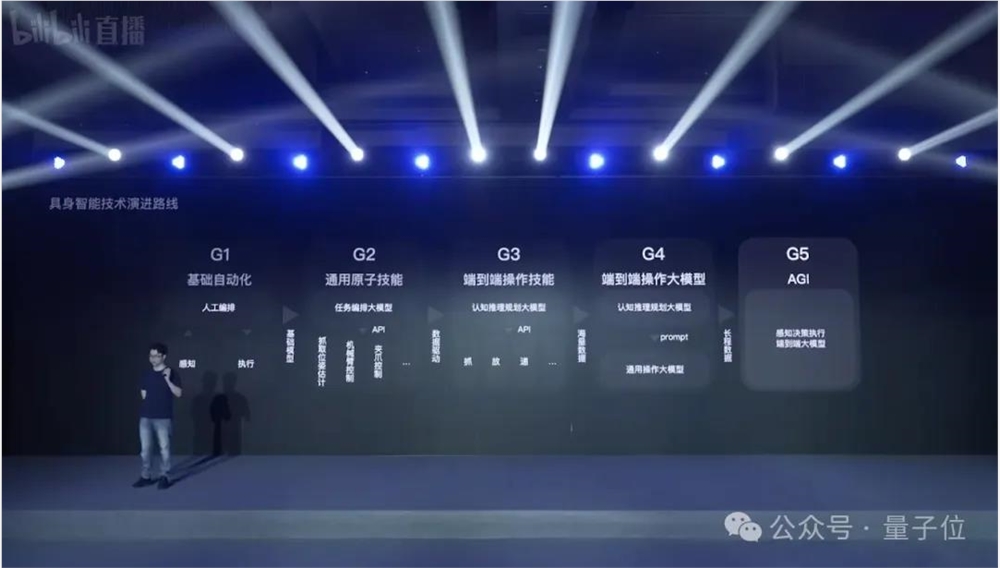
其中,G1为传统自动化阶段,机器人基于大量人工编排执行任务,辅以简单视觉,基本不具备泛化能力。
G2阶段,有了大模型的加持,机器人开始实现一大类场景的快速迁移。
方法是,针对大量不同场景任务,提炼出可复用的原子能力,且以相对通用的方式实现这些能力。
过去一年,智元机器人在G2路线取得了阶段性突破,实现了通用的:位姿估计模型UniPose、抓取模型UniGrasp,力控插拔模型UniPlug等一系列zero-shot和few-shot的通用原子技能。

不过嘛,以上阶段都还采用了大量手工编排。
到了G3端到端阶段,机器人训练从算法驱动变成数据驱动。
此时,由手工设计各类原子能力变为依靠大量数据采集。这一阶段的目标是,形成一套通用技能训练框架。
比如发布会反复提到的“PPT能力”,即抓、放、递……
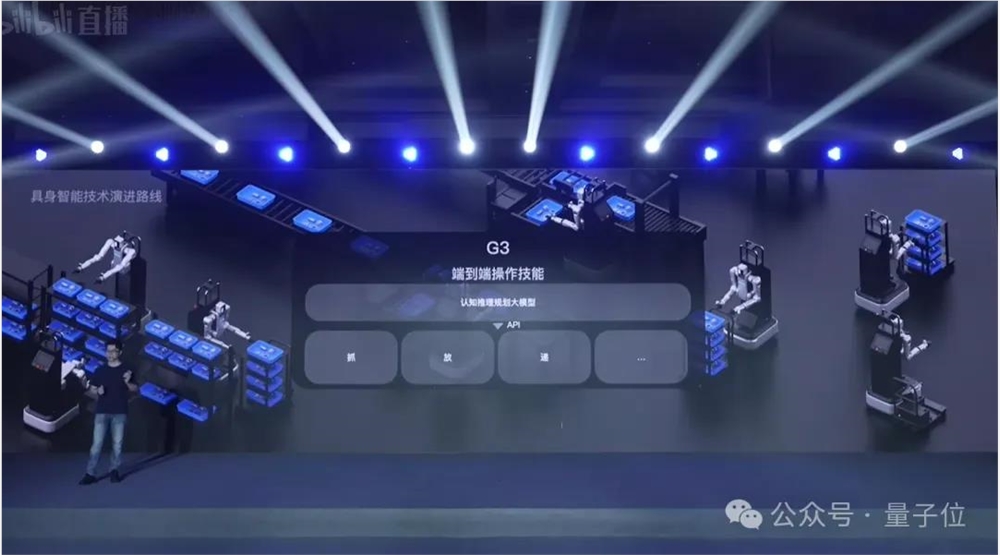
稚晖君特意提醒,当前实验表明,端到端是一条具备Scale up潜力的路线。
在G3基础上,G4主要实现通用操作大模型。
举个例子,比如对于开瓶子、开门把手这两个动作,G3阶段还需要单独采集数据,以训练不同的技能。
但对人类来说,其实动作的底层逻辑是相通的。
因此,G4引入了大量跨场景的真实、仿真数据,再加上时间模型等类似技术,让AI理解背后物理原理,从而执行更加复杂的任务。
至于最后的终极目标:AGI。对具身智能来说,主要还是能够走出实验室,在开放场景具备跨任务的泛化能力。
从G1到G5,一个显著趋势是:数据需求不断上涨。
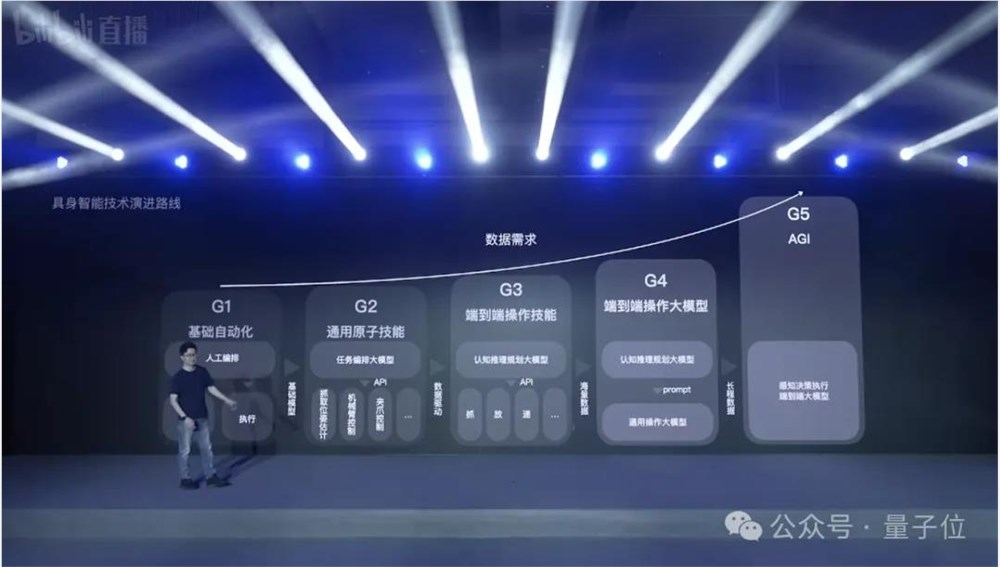
姜青松透露,目前智元已经迈向G3阶段。在G3路线上,智元机器人还形成了一套具身数据方案AIDEA。
这是因为,“有多少人工就有多少智能,在具身智能领域依然成立”。
也就是说,高质量的人机操作数据非常关键。
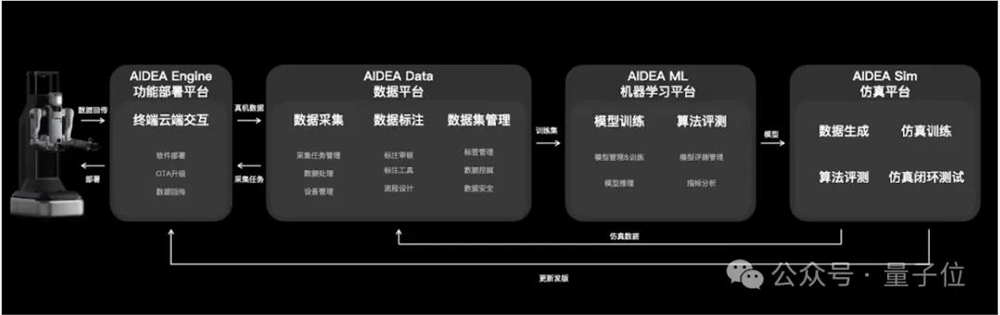
具体来说,AIDEA包括数采本体、遥操设备和数据平台。
数采本体也就是轮式、足式等类型丰富、可靠稳定的机器人。
遥操设备支持全身映射、臂手协同和高精实时。
数据平台覆盖数据采集、数据标注、数据管理、模型训练、模型评测、模型部署再到数据回传的全链路,支持SaaS服务和私有化部署。

彩蛋是,基于AIDEA的百万条真机、千万条仿真数据,同样开源。今年四季度,感兴趣的小伙伴可以蹲起来了~
“人形机器人人人造”
以为介绍完远征系列,智元机器人一年一度亮活大会就结束了吗?
并不!
稚晖君一声令下,远征A2-W缓缓推上来了一个没它高的神秘黑箱。
有点眼熟,好像是直播最开始,稚晖君指挥A2-Max搬走的那玩意儿:
里面的东西破箱而出,是智元推出的另一款机器人。
灵犀X1。
诞生于智元X-Lab实验室(也可以简单理解为智元内部的稚晖君实验室),是智元机器人专门面向极致创新和敏捷探索而设立的。

今年6月立项,10个人组团投入其中,不到半个月前刚刚正式降生。

视频录像显示,灵犀X1身经百摔:
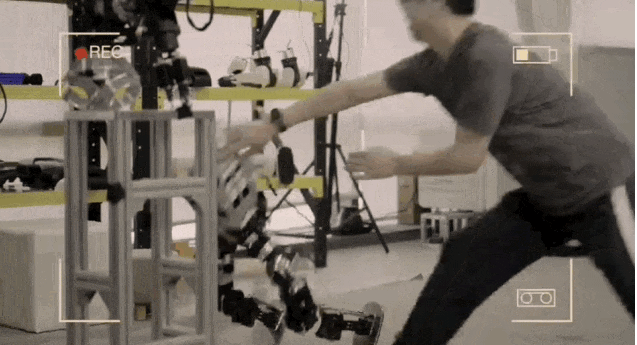
现在已经能做到被大力推攘也不会摔倒了。

△来人啊,这里有人霸凌具身小机器人(不是)
灵犀X1身高1.3米,体重小于33kg——比起远征系列,灵犀系列看起来更小巧玲珑;它的最大行走速度高于2米/秒,单臂负载大于3kg。
据介绍,灵犀X1全身上下都由两款自研PowerFlow关节搭建成,分别命名为PF86和PF52。
这两款PowerFlow对外销售。

此外,灵犀X1还具备中空走线、输出端绝对值编码、支持PF-Link智能接口等众多功能。
它融入了模块化设计理念,可以通过简单抱箍形式轻松拆装,尤其是它的两只“手”。
要知道,灵犀X1的标配是智元X-Lab自研的两个“带前馈力控、超低成本”的自适应通用夹爪。
自适应抓握,仅1个主动自由度。
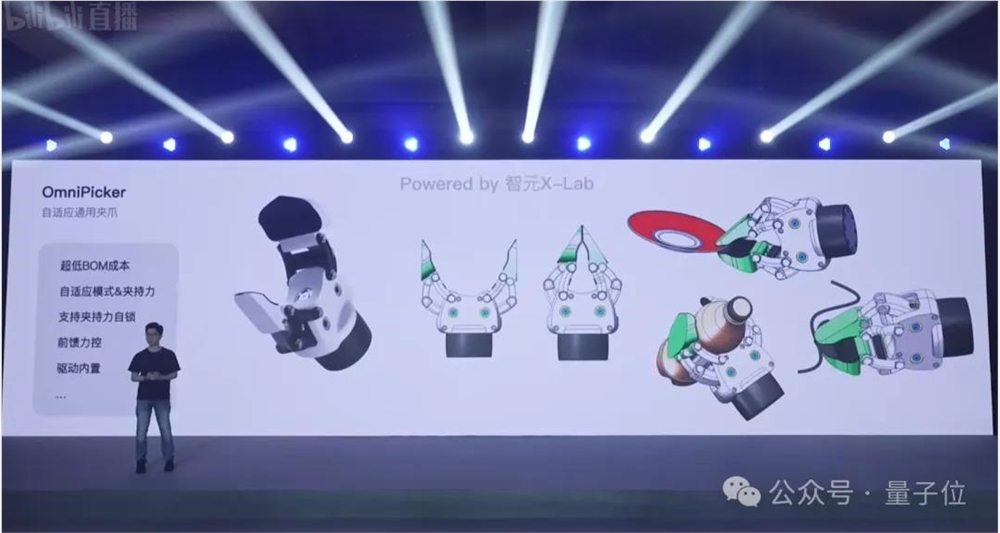
但泛化性很强,抓啥都行。
甚至是桌面上平躺着的一根针,也能稳稳夹起来。
但灵犀X1的执行器不仅可以是自适应通用夹爪,也可以是百元级成本的六维力传感器,满足不同场景需求的那种。
有点意思的是,灵犀X1可以开启“机机模式”。
简单来说,就是打开灵犀X1的脑子(里面本来是空的),把手机装进去,用性价比更高、功能更丰富、算力更强、普及率更广的手机,来当它的脑子。
然后大家就能看到以下这个又好笑又有点诡异的对话画面:

此外,灵犀系列还有款机器人:
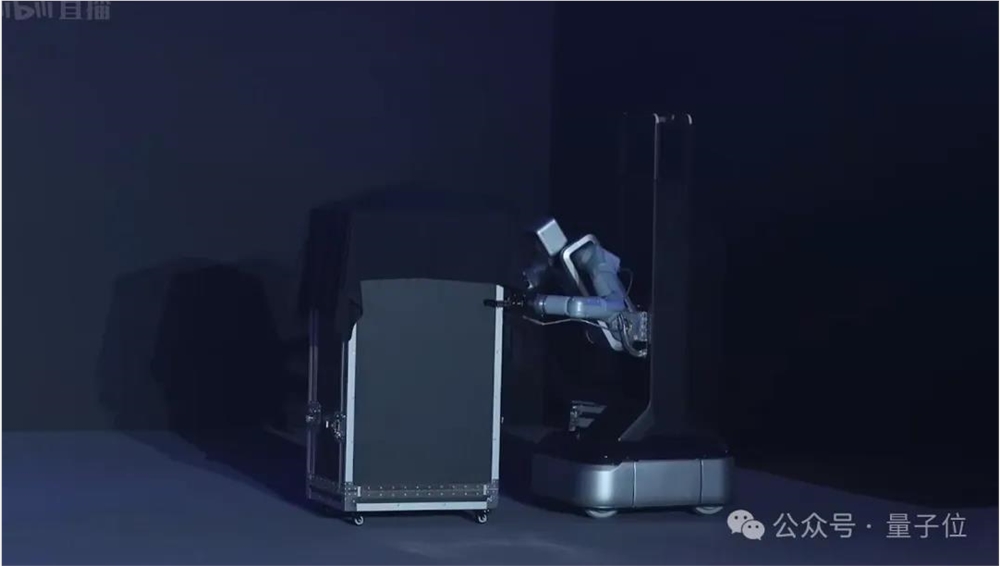
专业数采机器人X1-W。
和远征系列的A2-W一样,它们都是轮式,然后上半身可上下升降。
不过与采训推一体机器人A2-W相比,X1-W价格更低,适用于只做真实数据采集,服务预训练阶段;而A2-W可服务采集、训练、推理多个流程,不仅对预训练有用,对fine tuning也有用。
不同的应用场景可选用不同的机器人进行采集,搭配满足全栈数据采集需求。

最后就是大家都很关心的价格了。
“友商都很卷,我们不参与价格战。”说完这句话,稚晖君按下手中的PPT遥控器,屏幕上出现了灵犀X1的价格——
0元。

他表示,除自研关节外,灵犀X1的本体设计图纸、软件框架、中间件源码、基础运控算法,统统即将开源。
主打的就是一个“人形机器人人人造”。

稚晖君也现场给他的X-Lab打了波招聘广告,“欢迎有想法的年轻人加入智元,加入X-Lab”。
One More Thing
最后,咱再来简单正式介绍一下智元机器人(AgiBot)。
它成立于2023年2月,致力于AI 机器人的融合创新,以及打造具身智能机器人产品和应用生态。
创始团队包括稚晖君(彭志辉),电子科大毕业后,先后在OPPO研究院、华为工作(以华为天才少年身份入职)。同时,他也是B站up主,自称野生钢铁侠。
同为创始人的,还有上海人工智能研究院智慧康养首席科学家、上海交通大学机械与动力工程学院教授闫维新。
去年8月,智元机器人推出首款产品:
通用型具身智能机器人原型机,远征系列的A1。
今天,属于是智元机器人第二次大张旗鼓地对外展示研发和产品进展。
截止到目前,智元机器人已完成了A4轮等多轮融资。
智元官方还透露:
今年,智元机器人预估发货量达到300台左右,其中双足200台左右,轮式100台左右。
 0000
0000- 0000
- 0000
- 0000
- 0000