Waymo推出多智能体运动预测方法MotionLM
站长网2023-10-10 17:20:070阅
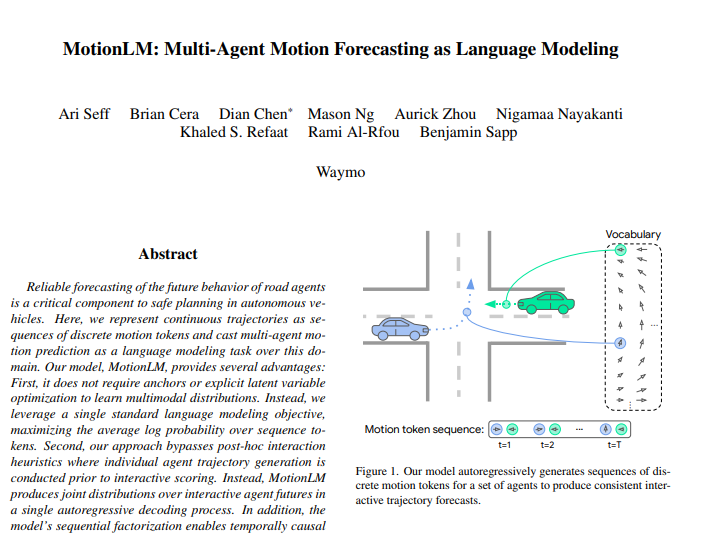
研究人员推出了一种名为MotionLM的新方法,用于预测道路上各种交通参与者的未来行为,这对于自动驾驶车辆的安全规划至关重要。MotionLM的主要思想是将多个道路参与者的行动预测任务视为一项语言建模工作,将预测任务视为创建语言短语的过程,其中语言是道路参与者的行动。
与现有方法不同,MotionLM不使用锚点或复杂的潜变量优化程序,而是采用简单的语言建模目标,以最大化正确预测未来动作令牌序列的平均对数概率。MotionLM的这种简单性使其更易于训练。
论文地址:https://arxiv.org/pdf/2309.16534.pdf
与许多当前方法不同,MotionLM使用单一的自回归解码方法来直接构建多个参与者未来行动的联合分布,这种交互建模集成更为高效和流畅。由于MotionLM的时序因子分解,还可以进行时间上因果条件的模拟。通过考虑事件之间的因果关系,可以更加真实和准确地预测未来的参与者行为。
在Waymo开放运动数据集的测试中,MotionLM表现出色,位居互动挑战榜首,表明它在复杂情况下预测道路参与者行为方面的性能优于其他方法。总之,MotionLM是自动驾驶车辆多代理动态预测的创新方法,对该领域的发展非常有益。
0000
评论列表
共(0)条相关推荐
- 0000
- 0002
- 0000

 0000
0000

 0000
0000

