仿生机器人平台Faive Hand:机械手可具备更灵活的操作能力
站长网2023-08-09 15:14:480阅
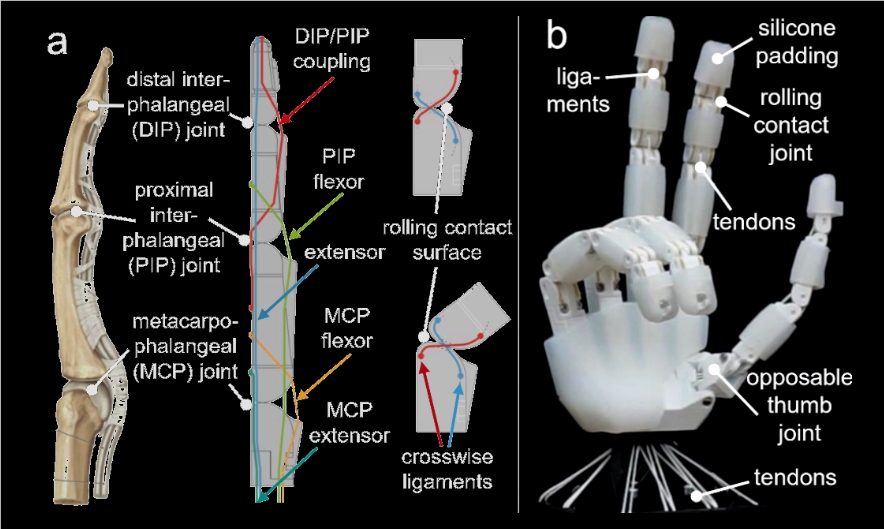
Faive Hand 是一款生物仿生的韧带驱动机械手,具备11个可操控的自由度,旨在为灵巧操作研究提供低成本的硬件平台。通过使用滚动接触关节设计,该机械手实现了三维打印、稳定可靠的高自由度手部设计。
该产品旨在为许多研究机构提供低成本的硬件平台,加速人型机器人手在实际应用中的应用。

特点:
滚动接触关节设计:使用滚动接触关节实现16个关节的运动控制,模拟人类手指的关节结构,提供更加自然和灵活的操作能力。
低级控制器:通过扩展卡尔曼滤波器从肌腱长度估计关节角度,实现关节控制和感知。
强化学习实现灵巧操控:使用具有优势的参与者-评论家 (A2C) 的 RL 进行训练,实现对手的灵巧操控,使手能够进行复杂的操作任务。
真实机器人运行:将训练好的策略应用于真实机器人上,并实现闭环控制,验证在实际环境中的操控效果。
领域随机化 (Domain Randomization): 引入领域随机化技术,提高策略的鲁棒性和适应性,使机器人能够适应不同的环境和任务需求。
0000
评论列表
共(0)条相关推荐
- 0001
- 0000
- 0000
- 0000
- 0000