逼真到被打假!OpenAI投的机器人身穿衣服做家务,被怀疑人类套壳拍视频
微软和OpenAI投资的人形机器人公司,又上新了!
来自挪威的机器人公司1X Technologies,发布了全新一代家务机器人NEO的原型。

不同于那些只有机械骨骼的钢铁巨兽,NEO穿上了人类一样的衣服,看上去更像人了。
NEO专为居家场景而打造,手部拥有20个自由度,可以完成一系列的泡咖啡操作。
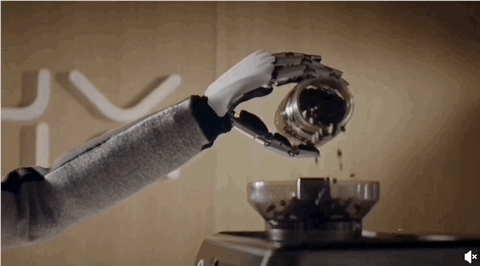
另外也主打超静音,只需要一个起身的动作,就能让NEO帮忙拿起地上的背包并递到手中。

有不少网友都认为,这一定是衣服里面有个真人在模仿机器人活动(手动狗头)。

甚至还有人站出来“打假”,发布了一个“1X团队招募演员冒充机器人”的截图。
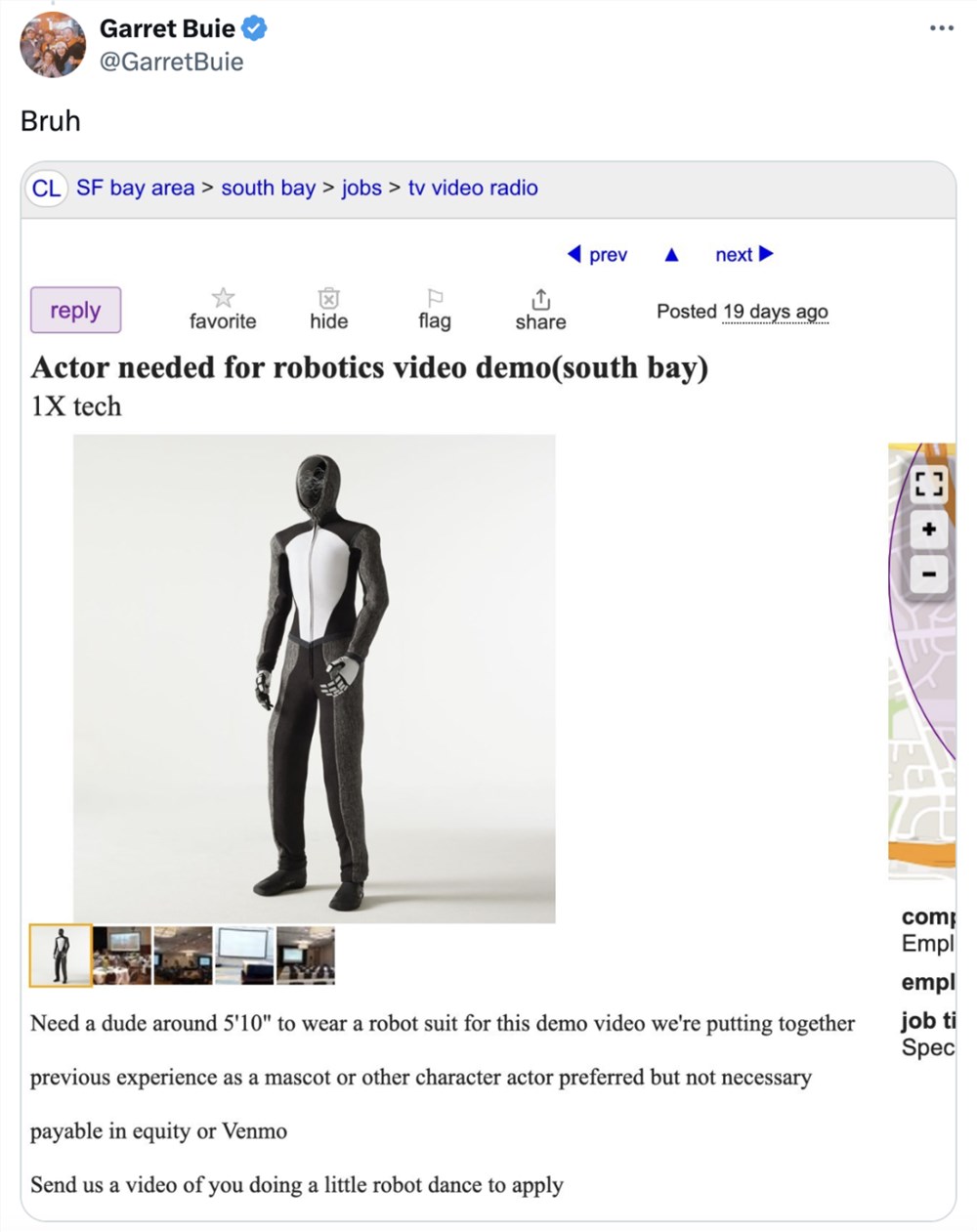
但这则“打假”推文很快就遭到了二次打假——这则所谓的招募通告实际上并不存在,而是由平台上一个毫不相干的通告篡改而成。

另外在一段纪录片中,1X的CEO等高管还透露了NEO的一些技术信息。
期间,CEO还表示NEO计划最快今年内发售,价格将努力控制在“相当于一辆经济型小汽车的水平”。
更像人类的机器人
接下来就让我们详细了解一下NEO这个“最接近人类”的机器人。
NEO身高5.41英尺(1.65米),体重66磅(29.9公斤),步行速度可达2.5英里(4.02公里)每小时。
它可以承受44磅(20公斤)的重量,是自身体重的2/3,续航时间为2-4小时。

NEO可以完成复杂的操作,它还能够整理橱柜中的高脚杯,动作十分平稳。

不仅如此,NEO还是人类的好搭档,在人类做饭时主动递上鸡蛋。

还能主动召唤人类,来一个大大的拥抱。

尤其是它穿上了衣服,给人的感受更加亲切了,而且相比于完全的钢铁之躯,也更具安全性。
在这些表现的背后又隐藏了哪些技术细节,1X公司CEO Bernt Børnich和负责AI的副总裁、前谷歌资深科学家Eric Jang一同进行了揭秘。

仿生设计让机器人更安全
首先在驱动方式上,不同于传统的刚性连杆驱动,NEO采用了类似人体肌腱的柔性驱动技术,用钢丝绳来传递力量。
在关节处,NEO采用了串联弹性驱动器,由两个低传动比的大扭矩电机协同,通过钢丝绳来拉动关节运动。
这种肌腱式驱动方式模仿了人类的肌肉运动,可以让机器人变得更加灵活柔顺。
同时这样的驱动方式也大幅提升了机器人的安全性——
弹性的方式驱动,大幅降低了机器人刚度,降低了碰撞时的能量;
类肌肉的拉线驱动,也去除了高速旋转的部件,使机器人运动更加柔和。
Bernt Børnich表示,安全问题是1X团队在研发NEO时的首要考量。
不过不同于传统机器人将所有物理接触都视为“碰撞”并试图避免,NEO的设计从一开始就考虑到了与物理世界的常态化接触,在安全性和实际性能之间取得了较好的平衡。
除了机械部分的设计,NEO的另一大亮点就是加入了AI技能。
1X团队正在研发一个捕捉广泛世界知识的机器人基础模型,在真实家庭环境中采集数据,训练机器人形成广泛的家务技能。
在实际工作中,NEO也会不断学习,与他们互动越多,使用起来就会感觉自然而直观。
NEO一些能力的训练是通过无代码界面来完成的,这意味着非专业人员也能参与AI系统的开发。
另外,1X团队还计划通过迁移学习等方式,将上一代的EVE机器人(轮式)积累的经验,快速移植到NEO上。
Bernt Børnich预计,到2027年,机器人将变得“足够智能”,并广泛应用于各种领域。
参考链接:
[1]https://www.1x.tech/androids/neo
[2]https://twitter.com/TheHumanoidHub/status/1829577272820736060
[3]https://www.youtube.com/watch?v=2ccPTpDq05A
[4]https://www.reddit.com/r/singularity/comments/1f5jdsd/neos_20_degrees_of_freedom_hand_enables_humanlike/
- 0000
- 0000
- 0000
 0000
0000- 0000