李飞飞团队推手部动捕系统DexCap 泡茶剪纸轻松完成
要点:
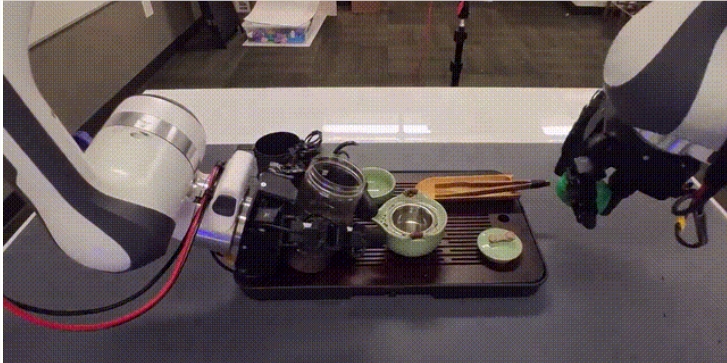
李飞飞团队开发了成本仅3600美元的便携式手部动捕系统DexCap,能让机器人完成各种花样任务。
DexCap系统利用SLAM、电磁场和3D观察实时追踪手部运动,配合新算法DEXIL,实现了精确的手部动作模拟。
DexIL框架通过人手动作捕捉数据训练机器人,克服了手部尺寸差异和视觉差距等挑战,使机器人能够学习复杂的操作技能。
李飞飞团队最新开发的DexCap系统彰显了人工智能领域的巨大进步。这一便携式手部动捕系统不仅成本低廉,仅需3600美元,而且能够让机器人完成各种复杂任务。通过结合SLAM、电磁场和3D观察等技术,DexCap实现了对手部运动的实时追踪,同时采用了全新的模仿算法DEXIL,能够精确模拟手部动作。这一技术突破使得机器人能够更好地学习人类操作技能,实现了人机交互的深度融合。
论文地址:https://arxiv.org/pdf/2403.07788.pdf
DexCap系统的核心设计在于其前向后向设备的组合,其中包括正面胸部相机架和背面背包中的迷你PC。通过这些设备,系统能够实时捕捉用户的手部运动,并进行精确的模拟。而DexIL框架则进一步提升了系统的学习能力,通过重新定位数据和使用点云观测,克服了手部尺寸差异和视觉差距等挑战,实现了从人类手部动作数据中训练机器人的目标。
除了技术方面的突破,DexCap系统还提供了便捷的人在回路纠正功能,使用户能够根据需要灵活调整机器人的动作。通过残差纠正模式和遥控操作模式,用户可以实现精细控制或全面控制机器人的动作,从而更好地适应不同的任务需求。这一功能的引入进一步提升了系统的实用性和灵活性,使其能够广泛应用于各种场景中。
总的来说,DexCap系统的问世标志着人工智能领域在机器人技术方面的重大突破。它不仅提供了成本低廉的解决方案,还实现了对复杂任务的高效执行,为个人机器人和个人AI的发展开辟了新的可能性。随着这一技术的不断完善和推广,相信将会为人类生活带来更多便利和惊喜。
- 0000
- 00013
- 0002
- 0000
- 0000