新AI模型DPPFA−Net可精准检测到小型3D物体存在
## 划重点:
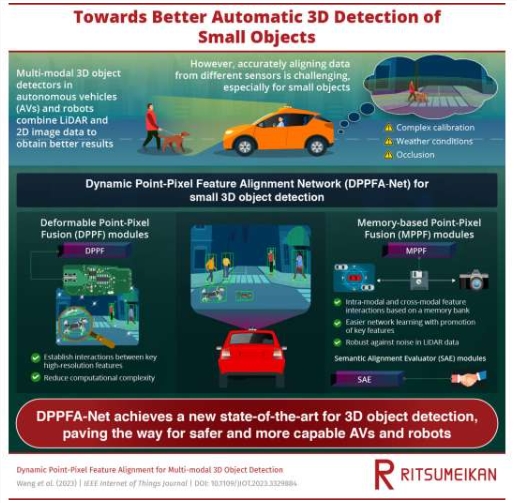
- 🌐 研究团队在日本立命馆大学开发了一种名为“Dynamic Point-Pixel Feature Alignment Network”(DPPFA−Net)的模型,通过创新策略准确地结合3D LiDAR数据和2D图像,显著提高了小目标检测的性能。
- 🚗 多模态3D物体检测方法,结合标准相机拍摄的2D RGB图像和LiDAR数据,能够更准确地感知环境,尤其在恶劣天气条件下,相较于仅使用LiDAR数据,性能更为出色。
- 🤖 DPPFA−Net在KITTI Vision Benchmark测试中表现优异,平均精度在不同噪声条件下提高了高达7.18%,对多模态噪声环境的鲁棒性使其达到了新的技术水平。
日本立命馆大学的Hiroyuki Tomiyama教授领导的研究团队最近开发了一种名为“Dynamic Point-Pixel Feature Alignment Network”(DPPFA−Net)的创新模型,旨在解决3D物体检测中对小目标检测困难的问题。该模型采用了多模态方法,巧妙地结合了3D LiDAR数据和2D图像,以在恶劣天气条件下提高性能。
在目前技术飞速发展的机器人和自动驾驶汽车领域,准确感知环境对于确保工作和交通的安全与高效至关重要。传统的3D物体检测方法主要使用LiDAR传感器创建环境的3D点云,通过激光束快速扫描和测量源周围物体和表面的距离。然而,仅使用LiDAR数据可能在恶劣天气条件下产生误差,尤其是在雨天。
为了解决这一问题,科学家们开发了多模态3D物体检测方法,将3D LiDAR数据与标准相机拍摄的2D RGB图像相结合。尽管2D图像和3D LiDAR数据的融合可以产生更准确的3D检测结果,但仍然面临一系列挑战,其中准确检测小物体尤为困难。
DPPFA−Net模型包括三个新颖模块的多个实例:Memory-based Point-Pixel Fusion (MPPF)模块,Deformable Point-Pixel Fusion (DPPF)模块和Semantic Alignment Evaluator (SAE)模块。MPPF模块负责在模态内部特征(2D与2D和3D与3D)以及模态间特征(2D与3D)之间执行明确的交互,通过将2D图像作为内存库,降低网络学习难度,提高对3D点云中噪声的鲁棒性。
与此相反,DPPF模块仅在关键位置的像素上执行交互,通过智能采样策略确定这些位置,从而在低计算复杂性下以高分辨率融合特征。最后,SAE模块在融合过程中确保两种数据表示之间的语义对齐,缓解特征模糊问题。
研究人员通过与广泛使用的KITTI Vision Benchmark中的表现最佳模型进行比较,测试了DPPFA−Net的性能。值得注意的是,在不同噪声条件下,提出的网络在平均精度方面取得了高达7.18%的改进。为了进一步测试模型的能力,团队通过在KITTI数据集中引入人工多模态噪声(如雨水),创建了一个新的嘈杂数据集。
结果显示,与现有模型相比,该网络不仅在面对严重遮挡时表现更好,而且在不同水平的恶劣天气条件下也更为出色。Tomiyama教授表示:“我们对KITTI数据集和具有挑战性的多模态嘈杂案例进行的广泛实验表明,DPPFA-Net达到了新的技术水平。”
准确的3D物体检测方法在改善我们的生活方面有多种潜在应用。依赖于这些技术的自动驾驶汽车有望减少事故、提高交通流畅度和安全性。此外,在机器人领域的影响也不可忽视。Tomiyama教授解释说:“我们的研究可以促进对机器人对工作环境的更好理解和适应,实现对小目标更精确的感知。”
DPPFA−Net的推出标志着多模态3D物体检测领域的一项重大进展,有望为深度学习感知系统的原始数据预标注提供新的可能性,从而显著降低手动注释的成本,加速该领域的发展。
项目研究论文:https://ieeexplore.ieee.org/document/10308573/
- 0000
- 0000
- 0000
- 0000
- 0000