谷歌DeepMind发布“机器人宪法”以确保其AI机器人不会伤害人类
**划重点:**
1. 🧠 AutoRT是一个数据收集的AI系统,通过Isaac Asimov的“机器人三定律”提供安全提示,确保机器人在执行任务时不伤害人类。
2. 🌐 DeepMind的新技术包括SARA-RT和RT-Trajectory,旨在提高机器人决策的准确性和速度,使其更适应特定的物理任务。
3. ⚙️ 在7个月的实地测试中,谷歌部署了53台AutoRT机器人,采用VLM和LLM相互协作,以及设置了关节力量阈值和物理切断开关以确保安全。
谷歌DeepMind的机器人团队宣布了三项新进展,旨在帮助机器人在复杂环境中做出更快、更好、更安全的决策。其中之一是一个用于收集训练数据的系统,配备了“机器人宪法”,以确保您的机器人办公助手在为您取更多打印纸的同时不会撞到处于途中的人类同事。
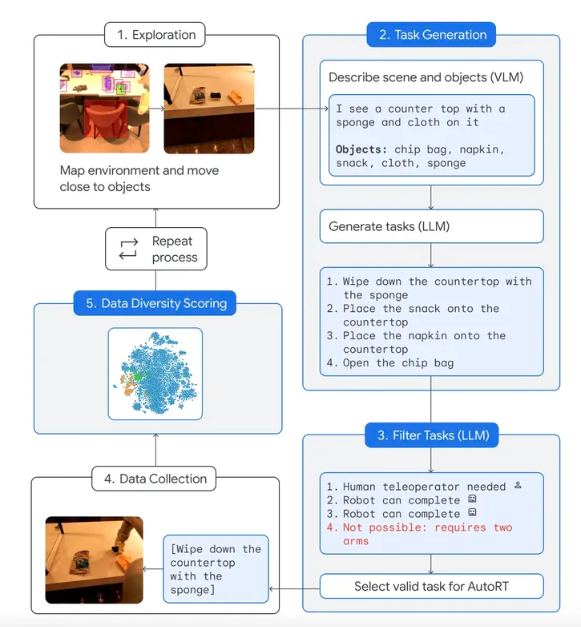
谷歌的数据收集系统AutoRT使用了视觉语言模型(VLM)和大型语言模型(LLM),相互协作以理解环境、适应陌生情境,并决定适当的任务。该“机器人宪法”灵感来自于Isaac Asimov的“机器人三定律”,被描述为一组“以安全为重点的提示”,指导LLM避免选择涉及人类、动物、尖锐物体甚至电器的任务。
为了额外的安全性,DeepMind将机器人程序设计成在其关节受力超过一定阈值时自动停止,并添加了一个物理切断开关,以供人类操作员使用进行停用。在为期七个月的时间里,谷歌在四个不同的办公楼部署了53台AutoRT机器人,并进行了超过77,000次试验。一些机器人由人类操作员远程控制,而另一些则根据脚本或完全自主地使用谷歌的Robotic Transformer (RT-2) AI学习模型操作。
AutoRT对每个任务执行以下四个步骤。在试验中使用的机器人看起来更加实用,配备有摄像头、机械臂和移动底座。Google在其博客文章中指出:“对于每个机器人,系统使用VLM理解其环境和视野内的物体。接下来,LLM提出一系列创造性的任务清单,如‘将零食放在台面上’,并扮演决策者的角色,选择机器人执行的合适任务。”
DeepMind的其他新技术包括SARA-RT,这是一个神经网络架构,旨在提高现有Robotic Transformer RT-2的准确性和速度。此外,RT-Trajectory添加了2D轮廓,帮助机器人更好地执行特定的物理任务,比如擦拭桌子。
虽然我们离能够完全自主为人们服务、整理枕头的机器人似乎还有很长的路要走,但当它们面世时,它们可能已经从AutoRT这样的系统中学到了一些经验。

 0000
0000
 0000
0000- 0001
- 0000
- 0001